DDPG与TD3:连续动作空间的深度确定性策略梯度
Open AI Spinning Up - DDPG - DDPG(Deep Deterministic Policy Gradient) Deep Deterministic Policy Gradient (DDPG) is an algorithm which concurrently learns a Q-function and a policy. It uses off-policy data and the Bellman equation to learn the Q-function, and uses the Q-function to learn the policy.
本文记录我在学习DDPG(Deep Deterministic Policy Gradient)和TD3(Twin Delayed DDPG)的过程,梳理清楚他们产生的背景,核心思想,特点以及我在实现过程中遇到的问题记录和解决。
1. 背景与动机
DQN在离散动作空间表现出色。然而,在许多实际控制任务中(如机器人控制、自动驾驶等),动作空间是连续的。DQN无法计算所有的$Q(s,a)$,代价太大。随着动作空间维度的提升,离散化动作空间带来的成本增加呈指数级别。
DDPG正是为解决连续动作空间控制问题而设计的。
2. DDPG核心思想
参考Policy Gradient和PPO,DDPG和TD3想要通过梯度下降的方法对Policy做优化(调节$\theta$),在训练结束的时候,具有一个最优化的$\theta$,使得$Q(s,a)$$\big(a=\mu_\theta(s)\big )$最大化,还要借鉴DQN当中使用到的replay buffer: $\mathcal D$和target network等技术,来提升训练的稳定性和效率。DQN通过Q网络1和target_Q网络2分别近似$Q^\star(s,a)$和$Q^\star(s’,a’)$,
根据Bellman Optimality Equation:
$$ Q^\star(s,a) = \mathbb{E}[r(s,a) + \gamma \max_{a’} Q^\star(s’, a’)] $$
从target Q网络中获取最优action的代码:
| |
通过$\mathcal D$中的采样数据形成batch,计算上式中的TD目标$r + \gamma \max_{a’} Q^\star(s’, a’)$。
针对连续动作空间,DDPG相对于DQN改进的地方主要在于,DQN网络输入只有状态$s$,输出是每个离散动作对应的Q值,无法利用动作网络$\mu(s)$的输出直接计算Q值,那么,就改造$Q _{\phi}$网络的输入为状态和动作的组合$(s,a)$,输出对应的Q值,这样就可以直接利用$\mu(s)$的输出作为Q网络的输入,根据计算结果来优化$\mu(s)$的参数$\theta$,使得在状态$s$下输出的动作$a$能够最大化Q值。
为了找到$\max_{a’} Q^\star(s’, a’)$里面的$a’$,使用$\mu _{\theta _{target}}(s’)$得到,即target_actor。并且每隔一段时间就将critic和actor网络的参数复制到target_critc和target_actor网络中(或者是软更新)。
所以优化的目标就是: $Q^\star(s,a)\approx Q_{\phi} ^\star (s,\mu_\theta(s))$:被优化的参数是$\theta$和$\phi$。
下面是DDPG的核心优化流程:
- 网络$Q_\phi(s,a)$用于评价当前policy $\mu_{\theta}$的critic,网络$Q_{\phi_{targ}}(s,a)$用于给出目标价值,主要目的是提供稳定的训练目标参考1。借助MSBE(mean-squared Bellman Error)更新Critic网络$Q_\phi$的参数$\phi$:
$$ \mathcal L(\phi,\mathcal D) = \mathbb E_{(s,a,r,s’)\sim \mathcal D} \bigg[ \bigg( r + \gamma(1-d) Q_{\phi_{targ}}(s’,\mu_{\theta_{targ}}(s’)) - Q_\phi(s,a) \bigg)^2 \bigg] $$
$d=1 \ if \ s’ \ is \ terminal \ else \ 0$,$\mathcal D$是经验回放缓冲区。
- actor网络$\mu_\theta(s)$的更新: $Q_{\phi}(s,a)$更新之后,Actor网络$\mu_\theta$优化的目标是:
$$ \max_{\theta} \mathbb{E}_{s \sim \mathcal{D}} [Q _{\phi}(s, \mu _{\theta}(s))] $$
- $\mu_\theta$更新之后,对环境重新交互,生成的$(s,a,r,s’)$加入回放缓冲区$\mathcal D$,重复上述过程。
3 DDPG的特点
3.1 确定性策略
与PPO等随机策略不同,DDPG采用确定性策略(Deterministic Policy):
$$ a = \mu_\theta(s) $$
这意味着给定状态时,Actor直接输出一个确定的动作,而不是动作的概率分布。
3.2 Actor-Critic架构
DDPG采用经典的Actor-Critic架构:
- Actor(策略网络):$\mu_\theta(s)$ - 输入状态,输出确定性动作
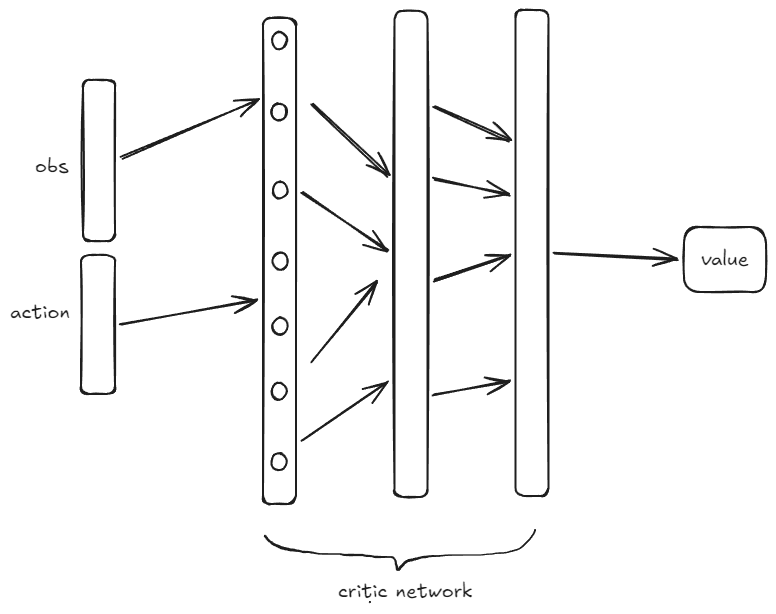
- Critic(价值网络):$Q_\phi(s, a)$ - 输入状态和动作,输出Q值
Critic网络的输入是状态+动作的组合,这是与PPO的重要区别。
3.3 经验回放与目标网络
DDPG借鉴了DQN的两个关键技术:
- 经验回放(Replay Buffer):存储$(s_t, a_t, r_t, s_{t+1})$ tuples,训练时随机采样,打破时间相关性
- 目标网络(Target Network):使用延迟更新的目标网络计算TD目标,提高训练稳定性
经验回放的四大优势
使用replay buffer有以下几个关键优势:
打破时序关联:一条轨迹中的$(s_t,a,r,s_{t+1})$具有强相关性,直接用于训练会导致网络难以收敛。随机采样打散了这种关联。
提高数据效率:在奖励稀疏的环境中(如机器人抓取),智能体可能需要探索很长时间才能获得少量有价值的transition。经验回放可以重复利用历史数据,多次从中采样进行更新,显著降低了数据采集成本。
支持优先采样:可以在不同训练阶段选择更有价值的transition进行学习。例如,当需要更多更新Actor时,可以优先选择那些更能提升策略的样本。
容纳多样化经验:回放缓冲区可以存储来自不同策略产生的数据,使最终学到的策略能够适应多变的环境,增强泛化能力。
3.4 探索策略
由于采用确定性策略,为了保证数据的多样性,需要对$\mu_\theta(s)$添加探索噪声:
$$ a = \mu_\theta(s) + \mathcal{N} $$ 我在实现get_action函数时候,犯了错:网络的输出本质上是一个在[-1, 1]范围内的动作值(因为Actor网络最后一层使用了tanh激活函数),所以,需要先将噪声也映射到[-1, 1]范围内,再和归一化的动作相加,最后再将动作映射到环境的实际动作空间:
| |
4. DDPG算法流程

5. TD3:双延迟深度确定性策略梯度
TD3是DDPG的改进版本,针对DDPG的Q值过估计问题提出了三项关键改进。
5.1 三大改进
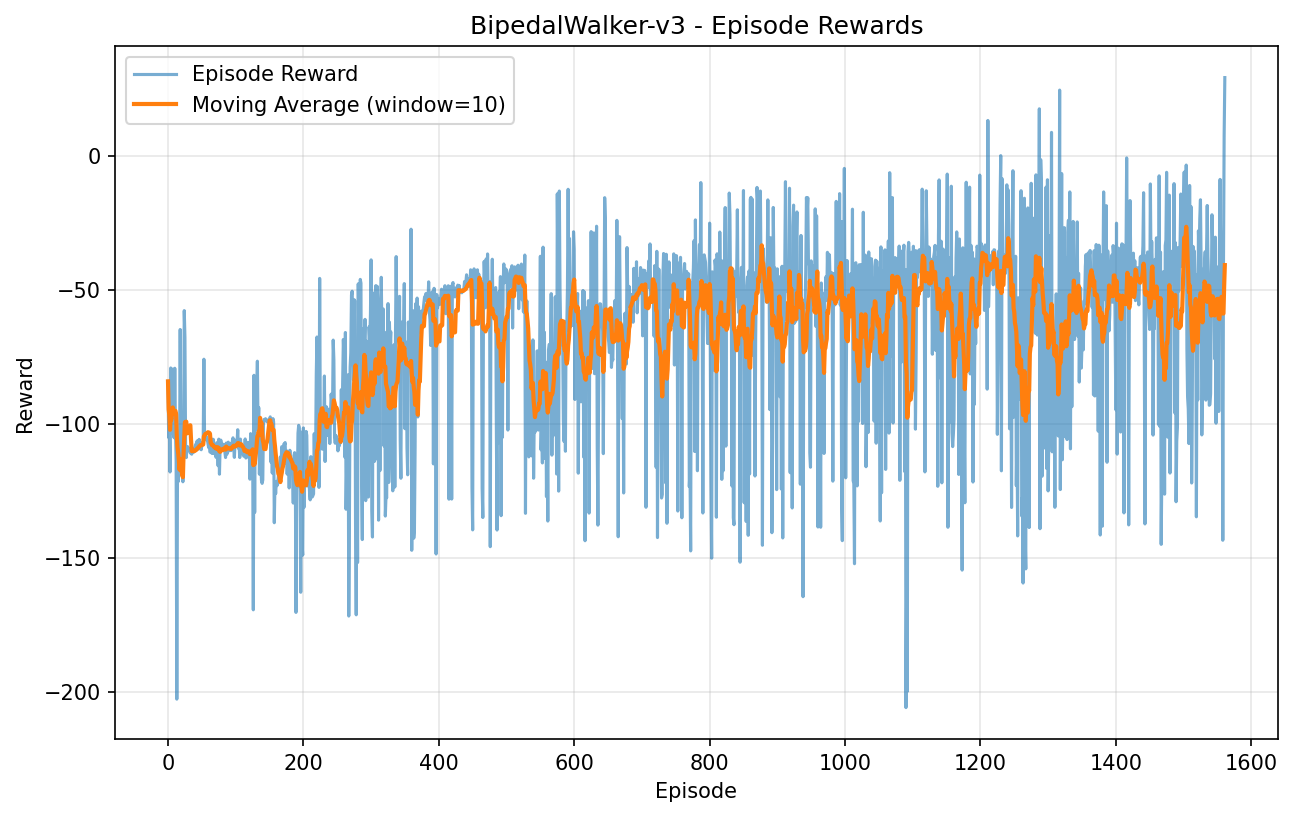
在使用DDPG训练过程中,遇到了Q值过估计的问题,导致训练不稳定,典型的现象就是reward先上升,然后下降,无法逼近预期的reward。TD3通过以下三项改进来解决这个问题:
- 截断双Q学习(Clipped Double Q-Learning)
使用两个独立的Critic网络$Q_{\phi_1} ^{\text{target}}$和$Q_{\phi_2}^{\text{target}}$在代码中是class DoubleQCritic:
| |
取较小的Q值作为目标:
$$ y = r + \gamma \min_{i=1,2} Q_{\phi_i}^{\text{target}}(s’, \mu_{\theta_{\text{target}}}(s’) + \epsilon) $$
- 目标策略平滑(Target Policy Smoothing)
在目标动作上添加小的随机噪声,防止Actor过度拟合Q函数的尖峰:
$$ a’ = \mu_{\theta_{\text{target}}}(s’) + \text{clip}(\epsilon, -c, c) $$ 其中$\epsilon \sim \text{clip}(\mathcal{N}(0, \sigma), -c, c)$为target policy noise:
Trick Three: Target Policy Smoothing. TD3 adds noise to the target action, to make it harder for the policy to exploit Q-function errors by smoothing out Q along changes in action.
- 延迟策略更新(Delayed Policy Updates)
Actor网络更新频率低于Critic网络(例如每2步更新一次Actor),避免策略在Critic未收敛时产生错误引导。
5.2 TD3算法伪代码

5. 实现细节与经验
5.1 关键实现要点
动作范围映射:Actor网络输出通常在[-1, 1],需要根据环境action_space映射到实际范围:
1action = action * (env.action_space.high - env.action_space.low) / 2 + (env.action_space.high + env.action_space.low) / 2目标网络软更新:
1 2for target_param, param in zip(target.parameters(), online.parameters()): target_param.data.copy_(tau * param.data + (1 - tau) * target_param.data)- 训练前,replay buffer需要预热,收集一定数量的随机交互数据,确保训练初期有足够的样本。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27for i_episode in count(): # each episode should env.reset() first observation, info = env.reset() state = torch.tensor(observation, dtype=torch.float32).unsqueeze(0) for t in count(): if currentStep > time_to_update: action = ddpg.get_action(state) else: action = env.action_space.sample() observation, reward, terminated, truncated, _ = env.step(action) currentStep += 1 episode_reward += reward done = terminated or truncated if terminated: next_state = None else: next_state = torch.tensor(observation, dtype=torch.float32).unsqueeze(0) reward_tensor = torch.tensor([reward]) action_tensor = torch.tensor(action, dtype=torch.float32).unsqueeze(0) ddpg.add_replay_memory(state, action_tensor, next_state, reward_tensor) state = next_state if currentStep > time_to_update: ddpg.train_model()
5.2 常见问题与调参经验
根据实际实现经验,DDPG/TD3常见问题:
Q值过估计:训练过程中Q值可能急剧上升,导致策略崩溃
- 解决:使用TD3的双Q网络和目标策略平滑
训练不稳定:rewards先变大后变小
- 解决:使用较小的学习率,TD3的延迟更新策略
探索不足:动作噪声衰减过快
- 解决:保持恒定的探索噪声,或使用递减策略
5.3 超参数推荐
| 参数 | DDPG | TD3 |
|---|---|---|
| Actor学习率 | 1e-4 | 1e-3 |
| Critic学习率 | 1e-3 | 1e-3 |
| 折扣因子γ | 0.99 | 0.99 |
| 目标网络保留率 | 0.996 | 0.995 |
| 批量大小 | 256 | 256 |
| 噪声σ | 0.1 | 0.1 |
| 目标噪声裁剪c | - | 0.5 |
| 延迟更新频率d | - | 2 |
6. PyTorch代码实现
6.1 Actor网络
Actor网络输入状态,输出一个确定性动作(使用tanh将输出限制在[-1, 1]):
| |
6.2 Q-Critic网络
Critic网络输入状态和动作的组合,输出Q值:
| |
6.3 Double Q-Critic网络(TD3)
| |
7. Stable-Baselines3使用示例
除了自己实现,Stable-Baselines3中提供了高质量的TD3和DDPG实现:
| |
继承关系:
| |
8. 总结
DDPG是将深度学习与确定性策略梯度结合的里程碑式算法,为连续动作空间控制提供了有效解决方案。TD3通过三项关键改进显著提高了训练稳定性和性能,是目前处理连续控制问题的默认选择之一。
参考资料
- Human-level control through deep reinforcement learning (DQN) - Mnih et al., Nature, 2015
- DDPG Paper - Lillicrap et al., 2015
- TD3 Paper - Fujita et al., 2018
- OpenAI Spinning Up - DDPG
- OpenAI Spinning Up - TD3
- Stable-Baselines3 Documentation