本文参考了OPENCV
问题描述
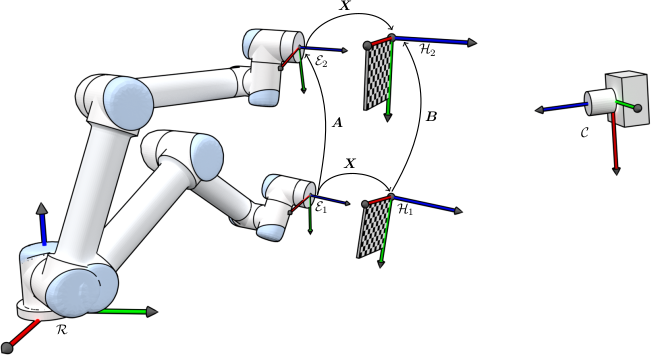
在机器人系统中,经常遇到需要确定相机(眼睛)与机器人末端(TCP)之间的安装关系。如果相机不在机械臂末端,往往末端会安装一个相机能够识别的标记物,相机系统给出该标记物在相机空间的三维坐标和姿态。无论上述哪种安装类型,都需要确定一个方程的解:$AX=XB$,$A,B$是已知的齐次矩阵,$X$是未知的齐次矩阵。
利用李代数和最小二乘解决$AX=XB$的问题。
平移旋转分开求解
从齐次等式提取旋转部分
$$ \begin{bmatrix} R_A & b_A \ 0 & 1 \end{bmatrix} \begin{bmatrix} R_X & b_X \ 0 & 1 \end{bmatrix}= \begin{bmatrix} R_X & b_X \ 0 & 1 \end{bmatrix}\begin{bmatrix} R_B & b_B \ 0 & 1 \end{bmatrix} $$
$$ R_AR_X=R_XR_B $$
李代数和李群之间的相互映射
在SO(3)上,旋转矩阵$R$的李代数$\phi$ $\boldsymbol u\in so(3)$是一个三维向量($\boldsymbol u$是一个单位向量,$\phi\in \mathbb R$)。$\boldsymbol u^{\wedge}$是一个反对称矩阵。
so(3)李代数到SO(3)的指数映射–罗德里格斯公式
$$ R=e^{\phi \boldsymbol u^{\wedge}}=\cos\phi I + (1-\cos \phi) \boldsymbol u\boldsymbol u^T + \sin \phi \boldsymbol u^{\wedge} $$
SO(3)到so(3)的对数映射
$$ log(R)=\boldsymbol \phi^{\wedge}=\frac{\phi}{2\sin\phi}(R-R^T) $$
其中,
$$ \phi = \arccos\left(\frac{trace(R)-1}{2}\right) $$
李代数$\boldsymbol u=[u_1 \ u_2 \ u_3]^T$对应的反对称矩阵的定义和性质
$$ \boldsymbol u^{\wedge}= \begin{bmatrix} 0 & -u_3 & u_2 \ u_3 & 0 & -u_1 \ -u_2 & u_1 & 0 \end{bmatrix} $$
并且,该反对称矩阵有性质:$R=e^{\phi\boldsymbol u^{\wedge}}$(体现了$\phi \boldsymbol u^{\wedge}$是旋转对时间导数的性质,$\phi$越大,意味着绕着转轴$\boldsymbol u$转动越快速)。
李群相等转换到李代数相等
问题转化:找到一个$X$,使得李群中的旋转$R_A$和$R_XR_BR_X^T$相等(这里是理想情况下,测量不带噪声)。 如果测量值$R_{A_i}$,$R_{B_i}$不带噪声,给定任意一组测量值$R_A$和$R_B$。看看李代数so(3)中的两个向量怎么和上述的旋转相等建立关系。
$$ \begin{aligned} & R_AR_X=R_XR_B \\ & R_A=R_XR_BR_X^T \\ & log(R_A)=log(R_XR_BR_X^T) \leftarrow \boldsymbol \phi_A^\wedge=log(R_A),\boldsymbol \phi_B^\wedge=log(R_B)\\ & \boldsymbol \phi_A^\wedge=R_X\boldsymbol \phi_B^\wedge R_X^T \leftarrow (R_X \boldsymbol \phi_B)^\wedge=R_X\boldsymbol \phi_B^\wedge R_X^T\\ & \boldsymbol \phi_A=R_X\boldsymbol \phi_B \end{aligned} $$
因为绕着一个轴旋转$\theta$和$\theta + 2\pi$角度效果是一样的,上面的推导有一个条件,就是约束$||\boldsymbol \phi_A|| \in (-\pi,\pi]$,$||\boldsymbol \phi_B|| \in (-\pi,\pi]$。
求解过程
测量带噪声
在给定数据带有噪声的情况下,我们把每一组转化之间的误差进行平方和最小化: $$ \arg_{R_X \in SO(3)}min\sum_i ||\boldsymbol \phi_{A_i} - R_X \boldsymbol \phi_{B_i}||^2 $$
根据Nadas:
$$ \eta=\sum_{i=1}^{N}||\Theta\boldsymbol x_i+\boldsymbol b -\boldsymbol y_i|| $$
当且仅当$\Theta = (M^TM)^{-1/2}M^T$使得$\eta$最小,其中,$M=\sum_{i=0}^{i=N}{x_i y_i^T}$
数据预处理
采集了${R_{A_0},R_{A_1},\cdots,R_{A_n}}$和${R_{B_0},R_{B_1},\cdots,R_{B_n}}$数据。先根据上面的方法,求出$\alpha_i=log(R_{A_i})$和$\beta_i=log(R_{B_i})$。 将$\alpha$和$\beta$组成矩阵$M$:
$$ M=\sum_{i=0}^{i=N}{\beta_i \alpha_i^T} $$
求解旋转矩阵
先求旋转参数$R^\star_X$
$$ R^\star_X = (M^TM)^{-1/2}M^T $$
求解平移向量
还有平移的参数需要估计$\boldsymbol b_X$。
$$ \begin{aligned} & R_A\boldsymbol b_X+\boldsymbol b_A=R^\star_X\boldsymbol b_B+\boldsymbol b_X \ & \rightarrow \eta_2=\sum_{i=1}^{N}||(R_{A_i}-I)\boldsymbol b_X-R^\star_X\boldsymbol b_{B_i} +\boldsymbol b_{A_i}|| \end{aligned} $$ 上面的最小化,是典型的最小二乘问题:投影矩阵和最小二乘
$$ \begin{aligned} & M_i=R_{A_i}-I,\boldsymbol y_i=R^\star_X\boldsymbol b_{B_i} -\boldsymbol b_{A_i} \\ & C= \begin{bmatrix} M_1 \\ M_2 \\ \vdots \\ M_N \end{bmatrix} \\ & Y=\begin{bmatrix} \boldsymbol y_1 \\ \boldsymbol y_2 \\ \vdots \\ \boldsymbol y_N \end{bmatrix} \\ & \boldsymbol b_X^\ast= \arg_{\boldsymbol b_X}min(C\boldsymbol b_X-Y)=C^{-1}C(CC^T)^{-1}C^T=(CC^T)^{-1}C^T \end{aligned} $$
到此,旋转和平移全部求出。
代码
| |
如何使用:
| |