学习RL(三)
第四章节 动态规划
4.4 价值迭代
上一篇笔记当中的JCR的例子的实现过程,是将策略评估和策略改进分开进行的,具体地讲,就是在策略评估阶段,需要针对每个状态,在给定的策略下,做Bellman计算得到新状态价值,然后拿着这个
价值迭代解决的是如何提高上述两个阶段的效率,以达到一个更快找到最优策略的目的。
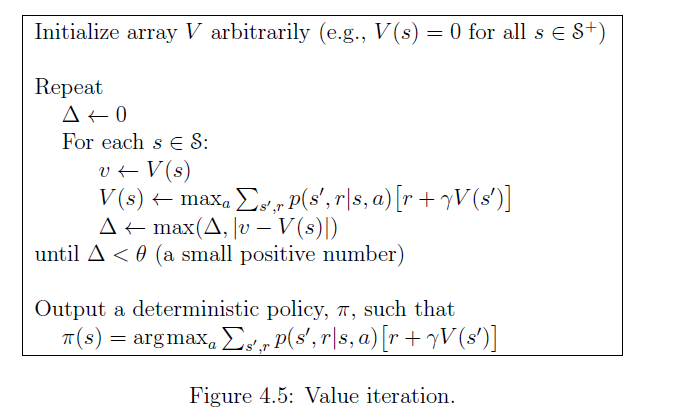
思路就是在策略评估阶段,先不要着急根据当前的策略去更新状态价值,而是遍历一下所有的行动,找到在当前状态下使得行动价值最大化的那个行动,直接替换该状态的行动,根据这个行动做Bellman的计算更新状态价值,最终循环这个过程直到状态价值变化很小达到收敛。
赌徒(Gambler)问题
具体的问题描述就不在这里赘述了。下面记录一下实现代码过程中遇到的问题。
代码实现过程中遇到的理解问题
- 价值迭代最核心的点是在某一个状态
下,直接遍历所有的actions, 计算出一组 , 在这组数当中找到最大的那个,对应的 变为 ,并且需要随时将更大的 替换掉当前的状态价值函数 。这里需要注意,可能在尚未找到最优动作之前, 已经做了若干次的更新。 updateStateValue函数需要根据Bellman方程来更新状态价值,我最开始的实现错误地将Reward设置为1,这样造成的结果是计算出很大的。 - 最后计算出来的策略结果和书中有出入,作者提到了最优解是不唯一的,我仔细看了最后一次迭代的中间结果,发现采取两个不同的行动,对应计算出来的状态价值差距特别小,在小数点后10位了,所以这种情况下,其实选择任意一个都是最优的。
python 代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87import matplotlib.pyplot as plt
import numpy as np
import math
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.animation as animation
import matplotlib.colors as colors
import matplotlib.cm as cm
from matplotlib.ticker import MultipleLocator
CONST_GOAL = 100
PROB_HEAD = 0.4
CONST_GAMMA = 1.0
CONST_EPSILON = 1e-3 # used for value iteration termination
states = np.arange(0, CONST_GOAL + 1)
stateValues = np.zeros(states.shape) # 1-99 total 99 number of states
stateValues[100] = 1.0 # goal state
historyStateValues = np.zeros((10,CONST_GOAL + 1))
policy = np.zeros(states.shape)
def getPossibleActions(capital):
actions = []
if capital <= 50:
for i in range(0, capital + 1):
actions.append(i)
else:
for i in range(0, 100 - capital + 1):
actions.append(i)
return actions
def updateStateValue(state, action):
newValue = PROB_HEAD * (0.0 + CONST_GAMMA *stateValues[state + action] ) + (1.0 - PROB_HEAD) * (0.0 + CONST_GAMMA * stateValues[state - action])
return newValue
def main():
iteration = 0
delta = 1e6
while delta >= CONST_EPSILON:
iteration += 1
delta = 0.0
previousStateValues = stateValues.copy()
for capital in states:
possible_stakes = getPossibleActions(capital)
currentStateValue = stateValues[capital]
maxValue = -math.inf
for action in possible_stakes:
newStateValue = updateStateValue(capital, action)
# if iteration == 7:
# print("iteration:", iteration, "capital:", capital, "possible_stakes:", possible_stakes, "action:", action, "newStateValue:", newStateValue)
if newStateValue >= maxValue:
maxValue = newStateValue
stateValues[capital] = newStateValue
policy[capital] = action
delta = max(delta, abs(stateValues[capital] - currentStateValue))
historyStateValues[iteration % 10] = stateValues.copy()
# plot
fig, ax = plt.subplots(2, 1, figsize=(10, 10))
ax[0].xaxis.set_major_locator(MultipleLocator(5))
ax[1].xaxis.set_major_locator(MultipleLocator(5))
# first plot
axis_x = states
colors = plt.cm.tab10.colors[:10]
for k in range(iteration - 1):
axis_y = historyStateValues[k]
ax[0].plot(axis_x, axis_y,dashes=[2,2,5,2], label="iteration: " + str(k + 1), color=colors[k % 10])
ax[0].legend(handlelength=4)
ax[0].set_ylabel('value')
ax[0].set_title('state-value')
ax[0].grid()
# second plot
ax[1].set_ylabel('policy')
ax[1].set_title('state-policy')
ax[1].grid()
ax[1].stairs(policy[0:CONST_GOAL], states)
plt.show()
# print("Final state values: ", stateValues)
# print("Final policy: ", policy)
if __name__ == "__main__":
main()
上面的代码运行结束,可视化得到价值迭代过程和最优策略: 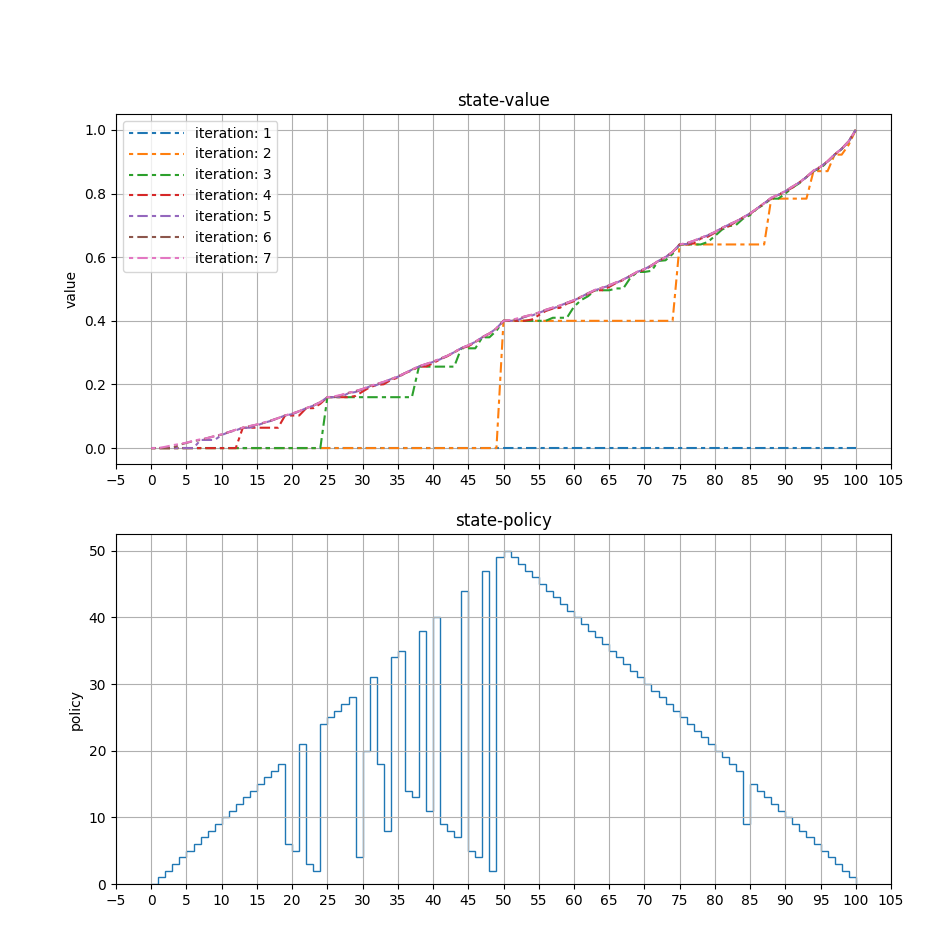
4.5 异步动态规划(Asynchronous Dynamic Programming)
这部分着重讲到了当面对现实问题的时候,状态的数量很庞大,可能采取的动作也很庞大,在这样的情况下,就算使用状态迭代的方法,也会造成很重的计算负担,实时性很差。异步动态规划可以解决这个问题。在计算的时候,可以选择性地保留一些状态,对这些状态进行迭代。 这部分并没有说具体的相关算法,但是提到了agent可以根据自己的经验,有选择地对某些状态进行迭代更新。后续应该会有相关的算法。
4.6 广义策略迭代(Generalized Policy Iteration)
是一个泛指,指代策略评估(Policy Evaluation)和策略改进(Policy Improvement)的交互过程。可以是顺序进行,也可以是融合在一起进行。
对立性:策略评估是认知的过程,即对当前的策略进行“客观”的分析,通过状态价值函数体现出来;策略改进,是打破策略评估的结果,在现有的策略框架下采取其以外的行动重新构建一个新的策略框架,这个时候,策略评估就需要针对新的策略进行重新分析。 所以说,对立体现在策略评估想要维护当前的现状,而策略改进想要打破现状,追求更高的状态价值。
合作性:没有策略评估,策略改进是没有依据的,因为策略评估给出了当前的状态价值,相当于给出了参考。没有策略改进,策略评估和现实世界距离太远,评估结果根本体现不出来现实世界的意义。
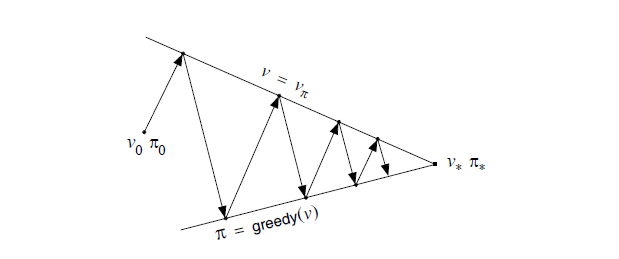
正如作者解释下面这张图,上面的策略评估这条线,代表为了找到真实的状态价值函数而做出的努力,下面的策略改进这条线,为了找到使得状态价值函数最大化的策略而做出的努力,两条线在不同的方向上面发展,最后发现各自做出的努力所取得的进展很小(
到这里,我突然想起来有人提过,强化学习就像一个自动控制系统当中的PID控制器,先通过反馈得到期望和状态的差,然后采取行动改变执行器的输出,接着反馈发生变化,再计算新的期望和状态的差(通常情况下,这个差会变小,假设期望值不变)。